Individual #2: Puente H L298N
Puente H L298N
¿Qué es y para qué sirve un puente h?
Es un componente formado por 4 transistores que permite invertir el sentido de la corriente, y de esta manera se puede invertir el sentido de giro del motor.Además, permite controlar la velocidad y la dirección de dos motores de corriente continua o un motor paso a paso de una forma muy práctica.
¿Cuáles son las entradas y salidas de un L298N?
El puente H L298N está equipado con jumpers de selección para habilitar cada una de las salidas del módulo (A y B.) La salida A esta conformada por OUT1 y OUT2 y la salida B por OUT3 y OUT4. Se debe agregar que las salidas para los motores A y B dan energía para mover los motores. Los pines de habilitación son ENA y ENB respectivamente.¿Cuál es la conexión de un L298N?
 Las salidas para los motores A y B brindan la energía para mover los motores. Hay que tener en cuenta la polaridad al conectarlos, para que cuando más tarde se puedan mover hacia adelante, funcionen como deberían. Si no fuera así, no tendríamos más que invertir las conexiones.
Las salidas para los motores A y B brindan la energía para mover los motores. Hay que tener en cuenta la polaridad al conectarlos, para que cuando más tarde se puedan mover hacia adelante, funcionen como deberían. Si no fuera así, no tendríamos más que invertir las conexiones.Los pines IN1 e IN2 sirven para controlar el sentido de giro del motor A, y los pines IN3 e IN4 el del motor B. Funcionan de forma que si IN1 está a HIGH e IN2 a LOW, el motor A gira en un sentido, y si está IN1 a LOW e IN2 a HIGH lo hace en el otro. Asimismo, con los pines IN3 e IN4 y el motor B.
Para controlar la velocidad de giro de los motores tenemos que quitar los jumpers y usar los pines ENA y ENB. Los conectaremos a dos salidas PWM de Arduino de forma que le enviemos un valor entre 0 y 255 que controle la velocidad de giro. Si tenemos los jumpers colocados, los motores girarán a la siempre a la misma velocidad.
Para conectar se puede usar los pines que se prefiera, con tal que se respete los que se conectan a ENA y ENB sean PWM.
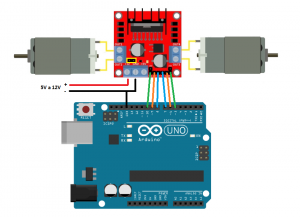
Hay dos maneras para conectar el módulo:
- Cuando el jumper de selección de 5V se encuentra activo, el módulo permite una alimentación de entre 6V a 12V DC. Como el regulador se encuentra activo, el pin marcado como +5V tendrá un voltaje de 5V DC. Este voltaje se puede usar para alimentar la parte de control del módulo ya sea un microcontrolador o un Arduino, pero se recomienda que el consumo no sea mayor a 500 mA.
- Cuando el jumper de selección de 5V se encuentra inactivo, el módulo permite una alimentación de entre 12V a 35V DC. Como el regulador no está funcionando, tendremos que conectar el pin de +5V a una tensión de 5V para alimentar la parte lógica del L298N. Normalmente, esta tensión es la misma de la parte de control, sea un microcontrolador o Arduino.
¿Qué es lo que hay que evitar al trabajar con un L298N?
- Introducir corriente por V lógico con el jumper de regulación porque se podría dañar el módulo.
- Nunca conectar una tensión de entrada al pin de +5V, cuando el jumper de selección de 5V se encuentre activado. Provocaría un corto y podría dañar permanentemente el módulo.
¿Cuál es el programa Arduino básico para avanzar, retroceder y parar utilizando dos motorreductores conectados a un L298N?
int motorA1=2; //motor 1
int motorA2=3; //motor 1
int motorB1=4; //motor 2
int motor2=5; //motor 2
void setup() { pinMode(motorA1,OUTPUT); //motor 1
pinMode(motorA2,OUTPUT); //motor 1
}
void loop() {
//movimiento hacia adelante digitalWrite(motorA1,HIGH);
digitalWrite(motorA2,LOW);
delay(3000); //por tiempo, solo por práctica
//movimiento hacia atrás digitalWrite(motorA1,LOW);
digitalWrite(motorA2,HIGH);
delay(3000); //por tiempo, solo por práctica
//detener
digitalWrite(motorA1,LOW);
digitalWrite(motorA2,LOW);
delay(2000); //por tiempo, solo por práctica
}
delay(3000); //por tiempo, solo por práctica
//detener
digitalWrite(motorA1,LOW);
digitalWrite(motorA2,LOW);
delay(2000); //por tiempo, solo por práctica
}
Bibliografía:
- Naylamp. (2016). Tutorial de Uso del Módulo L298N. Recuperado el 17 noviembre de 2019 desde https://naylampmechatronics.com/blog/11_Tutorial-de-Uso-del-M%C3%B3dulo-L298N.html
- Designthemes. (2019). Módulo controlador de motores L298N | Tienda y Tutoriales Arduino. Recuperado el 17 noviembre desde 2019 desde https://www.prometec.net/l298n/
- Electronilab. (2014). Tutorial: Uso de Driver L298N para motores DC y paso a paso con Arduino. Recuperado el 17 de noviembre de 2019 desde https://electronilab.co/tutoriales/tutorial-de-uso-driver-dual-l298n-para-motores-dc-y-paso-a-paso-con-arduino/

Comentarios
Publicar un comentario